Indukcinių artumo jungiklių veikimo principas, atmainos ir jų panaudojimo pavyzdžiai
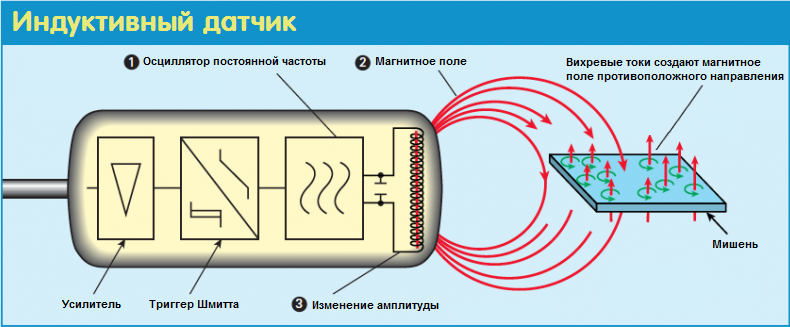
Bekontakčiai indukciniai jungikliai (artumo davikliai) naudojami automatizuotam nekontaktiniam įvairios pramoninės paskirties objektų aptikimui. Jų veikimo principas pagrįstas generatoriaus virpesių amplitudės pasikeitimo reiškiniu, susijusiu su tam tikro dydžio feromagnetinio, magnetinio ar metalinio objekto įvedimu į jutiklio darbo sritį.
Kai jutiklis yra įjungtas, jo darbo zonoje veikia kintamasis magnetinis laukas, o jei dabar į šią sritį įleidžiamas metalas, taikiniai nukreipiami į šį metalą sūkurinės srovės sukels generatoriaus pradinės virpesių amplitudės pasikeitimą, o pokyčio dydis priklausys nuo atstumo tarp metalinio objekto ir jutiklio. Atitinkama analoginio signalo reikšmė flip-flop bus konvertuojama į loginį signalą, kuris nustatys histerezės reikšmę ir perjungimo lygį.

Pats jungiklis šiame kontekste yra puslaidininkinis keitiklis, kuris valdo tam tikros išorinės trigerinės grandinės būseną priklausomai nuo stebimo objekto vietos, o objekto padėtis nustatoma be mechaninio kontakto su jutikliu.
Kaip tikriausiai jau supratote, čia yra jautrus elementas induktorius, kurio magnetinė grandinė yra atvira darbo zonos kryptimi.
Indukciniai ribiniai jungikliai priklauso didelei grupei bekontakčiai mechanizmų padėties jutikliai, kurios labai paplitusios šiuolaikinėse automatinėse sistemose.
Indukcinis artumo jungiklis tam tikroje automatikos sistemoje veikia kaip pagrindinis įrankis tam tikrų įrangos elementų padėčiai stebėti, iš kurių apdorojami signalai, priklausomai nuo įrangos paskirties, iš gaminių skaitiklio, judesio valdiklio, signalizacijos sistemos, ir tt n. .
Visų pirma, indukciniai artumo jungikliai dažnai naudojami metaliniams objektams skaičiuoti ir jų padėčiai sekti, pavyzdžiui, buteliai juda konvejeriu, ant kurio dangtelių jie skaičiuojami, arba surinkimo ceche po skaitiklio, flanšo pakeičiamas įrankis. yra indukcinio jutiklio diapazone. …
Jungiklio veikimo procesą galima apibūdinti taip. Darbinėje būsenoje prieš bekontaktinio jutiklio darbinį paviršių pulsuoja pastovios amplitudės magnetinis laukas.
Jei metalas priartėja prie jutiklio (pavyzdžiui, skardinis butelio dangtelis arba roboto mazge dalyvaujančios detalės dalis), tada bus tendencija slopinti magnetinio lauko virpesius, atitinkamai, Demoduliuota įtampa nukris, paleidžiamas gaidukas, kuris veda tol, kol perjungiamas elementas (pvz., kol įjungiamas skaitiklis arba kol pakeičiamas įrankis).
Visi pakankamo dydžio metaliniai objektai, pavyzdžiui: veleno iškyšos, flanšai, plieninės plokštės, movos varžtų galvutės ir kt., gali tarnauti kaip bekontakčių indukcinių jungiklių valdymo ar skaičiavimo objektai.

Pagal valdomos grandinės komutavimo principą ir prijungimo prie jos būdą indukciniai jutikliai yra kelių variantų, su skirtingu laidų skaičiumi. Jutikliai yra pastatyti NPN arba PNP jungiklių pagrindu, jie gali būti normaliai uždaryti arba normaliai atidaryti.
Dviejų laidų - jie yra tiesiogiai prijungti prie apkrovos grandinės ir maitinami per ją, čia labai svarbu stebėti poliškumą ir nominalią apkrovos varžą, kitaip jutiklis neveiks tinkamai.
Labiausiai paplitę yra trijų laidų jungikliai, jie turi dviejų laidų maitinimą, o trečiasis naudojamas perjungiamai apkrovai prijungti.
Galiausiai keturių laidų jungikliai turi galimybę pasirinkti perjungimo režimą (paprastai uždarytas arba įprastai atidarytas).
Kitas paplitęs padėties jutiklių tipas šiuolaikinėse automatinėse sistemose: Optiniai artumo jungikliai