Magnetinių laukų matavimo principai, prietaisai magnetinio lauko parametrams matuoti
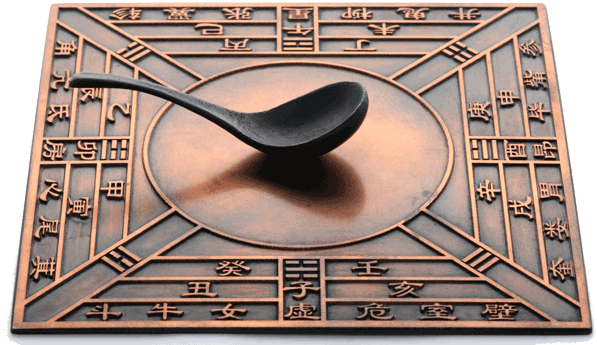
Pirmieji magnetiniai kompasai, nurodantys kryptis į Žemės magnetinius polius, pasirodė trečiajame amžiuje prieš Kristų Kinijoje. Tai buvo įtaisai trumpo koto apvalių samčių, pagamintų iš magnetinės geležies rūdos, pavidalu.
Šaukštas išgaubta dalimi buvo dedamas ant lygaus vario ar medinio paviršiaus, ant kurio buvo nupiešti skyreliai su zodiako ženklų atvaizdais, nurodant pagrindinius taškus. Norėdami įjungti kompasą, šaukštas buvo lengvai paspaustas ir jis pradėjo suktis. Galų gale, kai šaukštas sustojo, jo rankena buvo nukreipta tiksliai link Žemės pietinio magnetinio poliaus.
Nuo XII amžiaus kompasus aktyviai naudojo keliautojai Europoje. Magnetiniam nuokrypiui nustatyti jie buvo montuojami ir sausumos transporto, ir jūrų laivuose.
Nuo XVIII amžiaus pabaigos magnetiniai reiškiniai tapo to meto mokslininkų kruopštaus tyrimo objektu. Pakabukas 1785 metais pasiūlė Žemės magnetinio lauko stiprumo kiekybinio įvertinimo metodą. 1832 metaisGaussas parodė galimybę tiksliausiais matavimais nustatyti absoliučią magnetinio lauko stiprumo vertę.
Ryšį tarp magnetinių reiškinių ir jėgos efektų, pastebėtų judant elektros krūviams, pirmą kartą nustatė Oerstedas 1820 m. Maxwellas vėliau parašė šį santykį racionalia forma – matematinių lygčių pavidalu (1873):

Iki šiol magnetinio lauko parametrams matuoti naudojamas šis metodas:
-
teslametrai – jėgos H arba magnetinio lauko B indukcijos verčių matavimo įtaisai;
-
webmetrai – prietaisai magnetinio srauto Ф dydžiui matuoti;
-
gradiometrai – prietaisai magnetinio lauko nehomogeniškumui matuoti.
taip pat egzistuoja:
-
prietaisai magnetiniam momentui M matuoti;
-
vektoriaus B krypties matavimo prietaisai;
-
prietaisai įvairių medžiagų magnetinėms konstantoms matuoti.

Magnetinės indukcijos vektorius B apibūdina stipraus šalutinio veiksmo intensyvumą magnetinis laukas (prie poliaus arba į srovę) ir todėl yra pagrindinė jo charakteristika tam tikrame erdvės taške.
Taigi tiriamas magnetinis laukas gali stipriai sąveikauti arba su magnetu, arba su srovės elementu, taip pat gali sukelti indukcinį EML grandinėje, jei magnetinis laukas, prasiskverbiantis į grandinę, laikui bėgant keičiasi arba jei grandinė keičia padėtį magnetinis laukas.
Srovę nešantį elementą, kurio ilgis dl, indukcijos B magnetiniame lauke veiks jėga F, kurios vertę galima rasti pagal šią formulę:
Todėl tiriamojo magnetinio lauko indukciją B galima rasti pagal jėgą F, kuri veikia tam tikro ilgio l laidininką su žinomos vertės I nuolatine srove, esančia šiame magnetiniame lauke.
Praktiškai magnetiniai matavimai yra patogiai atliekami naudojant dydį, vadinamą magnetiniu momentu. Magnetinis momentas Pm apibūdina srities S kontūrą su srove I, o magnetinio momento dydis nustatomas taip:

Jei naudojama ritė su N apsisukimų, tada jos magnetinis momentas bus lygus:

Magnetinės sąveikos jėgos mechaninį momentą M galima rasti pagal magnetinio momento Pm ir magnetinio lauko indukcijos B vertes taip:
Tačiau norint išmatuoti magnetinį lauką, ne visada patogu naudoti jo mechaninės jėgos apraiškas. Laimei, yra dar vienas reiškinys, kuriuo galite pasikliauti. Tai elektromagnetinės indukcijos reiškinys. Elektromagnetinės indukcijos dėsnis matematine forma parašytas taip:
Taigi magnetinis laukas pasireiškia kaip jėgos arba sukelta EML. Šiuo atveju pats magnetinio lauko šaltinis, kaip žinoma, yra elektros srovė.
Jei žinoma srovė, sukurianti magnetinį lauką tam tikrame erdvės taške, tada galima rasti magnetinio lauko stiprumą tame taške (atstumu r nuo srovės elemento). naudojant Biot-Savart-Laplace dėsnį:
Reikėtų pažymėti, kad magnetinė indukcija B vakuume yra susijusi su magnetinio lauko stipriu H (sukurtu atitinkamos srovės) tokiu ryšiu:
Vakuuminė magnetinė konstanta SI sistemoje apibrėžiama amperais.Savavališkai terpei ši konstanta yra magnetinės indukcijos tam tikroje terpėje ir magnetinės indukcijos vakuume santykis, ir ši konstanta vadinama terpės magnetinis pralaidumas:
Magnetinis oro pralaidumas praktiškai sutampa su vakuumo magnetiniu pralaidumu; todėl orui magnetinė indukcija B yra praktiškai identiška magnetinio lauko įtempiui H.
Įrenginys magnetinei indukcijai matuoti NE — Tesla [T], CGS sistemoje — Gausas [G], ir 1 T = 10000 G. Matavimo prietaisai magnetinio lauko indukcijai nustatyti vadinami teslametrais.

Magnetinio lauko stipris H matuojamas amperais vienam metrui (A/m), 1 ampere/metre apibrėžiamas kaip vienetinio posūkio tankio begalinio ilgio solenoido magnetinio lauko stipris, kai juo teka 1 ampero solenoido srovė. Vienas amperas vienam metrui gali būti apibrėžtas ir kitaip: tai magnetinio lauko stipris apskritos grandinės centre, kai srovė yra 1 amperas, o kilpos skersmuo 1 metras.
Čia verta atkreipti dėmesį į tokią reikšmę kaip indukcijos magnetinis srautas - F. Tai yra skaliarinis dydis, SI sistemoje jis matuojamas Webers, o CGS sistemoje - Maxwells, kai 1 μs = 0,00000001 Wb. 1 Vėberis yra tokio dydžio magnetinis srautas, kad jam sumažėjus iki nulio, per prie jo prijungtą laidžiąją grandinę, kurios varža 1 omas, praeis 1 kulono krūvis.
Jei pradine verte imsime magnetinį srautą F, tada magnetinio lauko indukcija B bus ne kas kita, kaip magnetinio srauto tankis. Magnetinio srauto matavimo prietaisai vadinami webmetrais.

Aukščiau pažymėjome, kad magnetinę indukciją galima nustatyti arba pagal jėgą (arba pagal mechaninį momentą), arba pagal grandinėje sukeltą EML. Tai vadinamosios tiesioginės matavimo konversijos, kai magnetinis srautas arba magnetinė indukcija išreiškiama kitu fizikiniu dydžiu (jėga, krūviu, momentu, potencialų skirtumu), kuris pagal pagrindinį fizikinį dėsnį yra vienareikšmiškai susijęs su magnetiniu dydžiu.
Transformacijos, kai magnetinė indukcija B arba magnetinis srautas F yra per srovę I arba ilgį l arba spindulį r, vadinamos atvirkštinėmis transformacijomis. Tokios transformacijos atliekamos remiantis Biot-Savart-Laplace dėsniu, naudojant žinomą ryšį tarp magnetinės indukcijos B ir magnetinio lauko H stiprumo.