Technologinių parametrų jutikliai - jėga, slėgis, sukimo momentas
Norint įgyvendinti automatizuotą ir labai tikslų technologinių procesų valdymą, visada būtina turėti informaciją apie esamas pagrindinių technologinių parametrų reikšmes. Dažniausiai šiam tikslui naudojami įvairūs davikliai: jėgos, slėgis, sukimo momentas ir kt.. Pažvelkime į trijų tipų jutiklius, suprasime jų veikimo principą.

Visų pirma pažymime, kad jėgos ar sukimo momento jutiklių konstrukcijoje naudojami jautrūs elementai, kurių tam tikros savybės kinta priklausomai nuo esamo deformacijos laipsnio, atsirandančio dėl vienokio ar kitokio išorinio poveikio.
Tai gali būti elastingos metalinės plokštės, spyruoklės ar velenai, kurių deformacija perduodama magnetostrikciniam, pjezoelektriniam ar puslaidininkiniam elementui, kurio elektriniai ar magnetiniai parametrai tiesiogiai priklausys nuo deformacijos laipsnio. Pakaks išmatuoti šį parametrą, kad susidarytumėte supratimą apie deformacijos dydį ir atitinkamai jėgą (slėgį, sukimo momentą).
Tensometriniai deformacijų matuokliai

Paprasčiausias deformacijos matuoklis, pagrįstas įtempio matuoklio laido keitiklis apima mechaninį tamprų elementą, kuris yra deformuojamas, ir prie jo pritvirtintą deformacijos matuoklį, kurio deformacija tiesiogiai paverčiama elektriniu signalu.
Plona (nuo 15 iki 60 mikronų skersmens) nichromo, konstanto arba elinvaro viela, sulankstyta su gyvate ir pritvirtinta prie plėvelės pagrindo, veikia kaip deformacijos matuoklio jutiklis. Toks keitiklis priklijuojamas prie paviršiaus, kurio deformaciją reikia išmatuoti.
Dėl mechaninio elastingo elemento deformacijos viela ištempiama arba suspaudžiama išilgai jo ilgio, o jo skerspjūvis mažėja arba didėja, o tai turi įtakos keitiklio varžos elektros srovei pokyčiui.
Išmatavę šį pasipriešinimą (įtampos kritimą per jį), mes gauname supratimą apie mechaninės deformacijos dydį ir atitinkamai jėgą, jei žinomi deformuoto elemento mechaniniai parametrai.
Slėgio matuoklio sukimo momento jutikliai

Jėgos momentui matuoti naudojami jautrūs elastingi elementai spyruoklių arba plonų velenų pavidalu, kurie technologinio proceso metu susukami. Tamprioji kampinė deformacija, tai yra santykinis spyruoklės pradžios ir pabaigos kampas, išmatuojama ir paverčiama elektriniu signalu.
Elastingas elementas dažniausiai yra įdėtas į vamzdelį, kurio vienas galas fiksuotas stacionariai, o kitas prijungtas prie kampinio poslinkio jutiklio, kuris matuoja nuokrypio kampą tarp vamzdelio galų ir deformuojamo elemento.
Taigi gaunamas signalas, pernešantis informaciją apie sukimo momento dydį.Norint pašalinti signalą iš spyruoklės, įtempimo rezistoriaus elemento laidai slydimo žiedais sujungiami su šepečiais.
Magnetostrikcinės jėgos jutikliai
Taip pat yra jėgos jutiklių su deformacijos matuoklio magnetostrikciniais keitikliais. Naudota čia atvirkštinis magnetostrikcijos reiškinys (Villari efektas), kuris susideda iš to, kad spaudžiant šerdį, pagamintą iš geležies ir nikelio lydinio (pavyzdžiui, permaloido), pasikeičia jos magnetinis pralaidumas.
Išilginis šerdies suspaudimas veda prie išsiplėtimo jo histerezės kilpos, mažėja kilpos statumas, dėl to atitinkamai sumažėja magnetinio pralaidumo vertė - sumažėja jutiklio apvijų induktyvumas arba abipusis induktyvumas.
Kadangi magnetinės charakteristikos yra netiesinės, taip pat dėl to, kad jas labai veikia temperatūra, reikia naudoti kompensavimo grandinę.
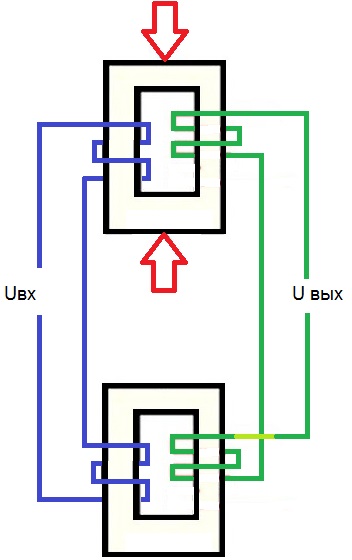
Kompensacijai taikoma tokia bendra schema. Uždara magnetostrikcinė magnetinė šerdis, pagaminta iš nikelio-cinko ferito, yra veikiama išmatuojama jėga. Tokia šerdis nepatiria jėgos slėgio, tačiau dviejų laidų apvijos yra sujungtos viena su kita, todėl pasikeičia bendras EML.
Pirminės apvijos yra vienodos ir sujungtos nuosekliai, jos maitinamos kintamąja srove, kurios dažnis neviršija dešimt kilohercų, o antrinės apvijos (taip pat tos pačios) įjungiamos priešingai, o nesant deformuojančios jėgos, bendra EML yra 0. Jei slėgis pirmoje šerdyje padidėjo, bendras EML išėjime yra ne nulis ir proporcingas deformacijai.