Kontaktinių ir bekontakčių važiavimo jungiklių palyginimas
Pramoninėje automatikoje plačiai naudojamos grandinės kelionės (padėties) jungikliai ir jungikliai kelių konstrukcijų, skirtų kontroliuoti įvairių gamybos mechanizmų padėtį ir remiantis šių mechanizmų judėjimo transformacija elektriniame signale.
Padėties jungikliai gali būti naudojami ir kitoms funkcijoms nei gamybos mechanizmų padėties valdymas, pavyzdžiui, sukimosi kampo, lygio, svorio slėgio valdymas ir kt.

Krypties jungikliai yra diskretiško veikimo įtaisai, veikiantys didinimo principu, tai yra, jie reaguoja tik į valdomo mechanizmo padėties pasikeitimą. Būdų jungiklių išėjimo signalas yra dviprasmiška mechanizmo judėjimo iš tam tikros pradinės padėties funkcija.
Kelių iešmų tipai
Atsižvelgiant į padėties perjungimo principus, perjungimo būdas skirstomas į:
-
mechaninis kontaktas su perjungimo kontaktais ir kontaktams jautriais elementais;
-
statinis kontaktas (magnetomechaninis), kurio jautrusis elementas yra nekontaktinis, o perjungimo elementas yra kontaktas;
-
statiniai bekontakčiai, jautrūs ir perjungiami elementai, iš kurių gaminami bekontakčiai.
Esant kontaktiniam mazgo „perjungimo – sustabdymo“ pobūdžiui, tai yra, varančiojo elemento (įvesties valdymo signalo) jungties su jautriu elementu kontaktinis pobūdis, šis mazgas vadinamas mechaniniu, o nekontaktiniu – statiniu. .
Priklausomai nuo konstrukcijos, jungikliai gali būti sujungti arba atskirti. Pirmuoju atveju jautrieji ir perjungimo elementai yra dedami į vieną korpusą ir struktūriškai atliekami kaip visuma. Antrajame jautrus elementas gali būti kelių dešimčių ir šimtų metrų atstumu nuo jungiklio.
Kelio jungiklio magnetinio lauko iškraipymas pasiekiamas keičiant parametrus magnetinė grandinė jautrus elementas. Kintami parametrai gali būti aktyvaus paviršiaus plotas ir oro tarpo dydis magnetinis pralaidumas magnetinė grandinė.
Šiuo metu mechaninių kontaktinių padėties jungiklių pritaikymo sritis pramonės automatikoje siaurėja, kyla klausimas dėl tokio tipo padėties jungiklių nenaudingumo automatinių valdymo sistemų kūrimo tikslams.
Pastarąjį sukelia šios priežastys:
-
Jungiklio ir stabdymo mazgo konstrukcijos sudėtingumas dėl griežtų reikalavimų, susijusių su daugelio parametrų leistinų svyravimų ribomis, sukelia didelių sunkumų gaminant ir reguliuojant.
-
Santykinai didelis šio prietaiso tikslumo charakteristikų kritiškumas destabilizuojančių veiksnių įtakai (kontaktinių paviršių susidėvėjimas, tvirtinimo detalių laisvumas, judančių elementų nesutapimas ir kt.).
Nemažai konstrukcinių mechanizmų sprendimų iš viso negali būti įgyvendinami remiantis mechaniniais kontaktiniais jungikliais. Tai apima mechanizmus, kuriems reikalingas didelis leistinas judesio jungiklių greičio ir dažnio lygis.
Jei reikiamą kelio iešmo veikimo greitį galima sumažinti dėl papildomų mechanizmo kinematinių jungčių, kurios, be kita ko, pablogina valdymo sistemos kokybės charakteristikas (ypač tikslumo parametrus), tada leistinas veikimo dažnis ( skiriamoji geba) gali padidėti dėl struktūrinių komplikacijų.
Taip pat žiūrėkite: Galinių jungiklių ir jungiklių montavimas
Kokia šiuo atveju yra plačiai paplitusio mechaninio kontaktinio padėties perjungimo principo naudojimo priežastis? Atsakymo į šį klausimą reikėtų ieškoti dviem aspektais: esamais automatinio valdymo sistemų konstravimo principais ir kontaktinio kelio jungiklio grandinės privalumais.
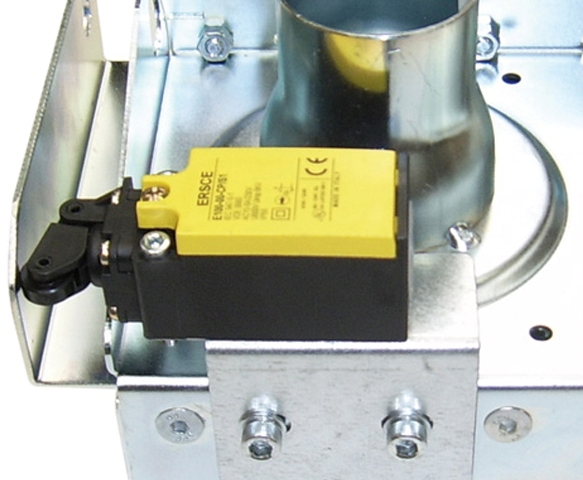
Kontaktinio kelio jungiklių privalumai
Mechaniniai kontaktiniai jungikliai, paprastai įgyvendinami su kelių grandinių išėjimu, pasižymi šiais privalumais:
-
didelis perjungimo koeficientas;
-
didelė specifinė valdymo galia (įtrauktos galios ir bendrųjų matmenų santykis);
-
universalumas, tai yra galimybė perjungti tiek nuolatinės, tiek kintamosios srovės grandines;
-
didelis įtrauktų įtampų diapazonas;
-
nereikšmingas vidinis energijos suvartojimas (maža uždaros būsenos kontaktų trumpalaikės varžos vertė);
-
maža veikimo tikslumo ir stabilumo priklausomybė nuo valdomos galios pokyčių.
Kontaktinio kelio jungiklių trūkumai
Šių įrenginių mechaninio kontakto principas dažnai neleidžia patenkinti išaugusių automatikos sistemų patikimumo, ilgaamžiškumo ir tikslumo reikalavimų. Be to, mechaniniai kontaktiniai jungikliai yra labai jautrūs įvairių klimato veiksnių poveikiui (ypač esant žemai temperatūrai).
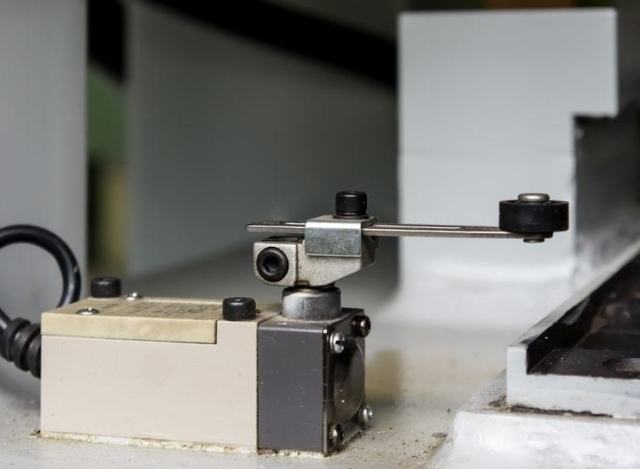
Mechaniniams kontaktiniams jungikliams būdingi riboti leistini didžiausio ir mažiausio perjungimo stabdžio judėjimo greičio lygiai, kurie yra 0,3–30 m/min intervale, o padidinus perjungimo stabdymo greitį virš leistino lygio, smarkiai sumažėja. jungiklio mechaninis patvarumas.
Tokiuose jungikliuose leistini perjungimo jėgos veikimo krypties nuokrypiai svirties ašies atžvilgiu yra labai maži, o jų viršijimas sukelia mechaninius pažeidimus, ypač jungikliuose su priekiniu traukimo strypu.
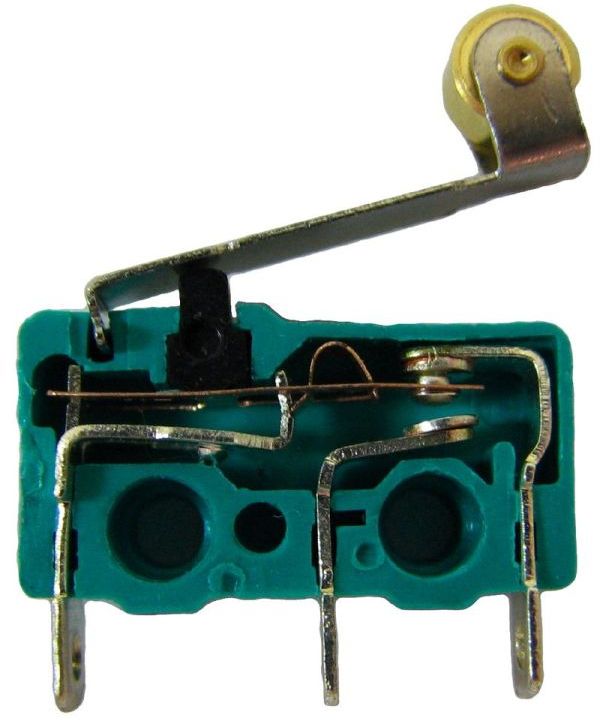
Norint gauti relės išėjimo charakteristikas (valdymo charakteristikas), tokių jungiklių konstrukcijoje numatyti paleidimo-spyruoklės įtaisai. Reikalingas relės išėjimo charakteristikų laipsnis pasiekiamas žymiai sumažinus jungiklio ilgaamžiškumą dėl didelių dinaminių įtempių, atsirandančių trigeryje paleidimo metu.
Mechaniniuose momentiniuose kontaktiniuose jungikliuose išėjimo charakteristikos histerezės kilpos (eigos diferencialo) plotis pasiekia reikšmingą vertę, kuri yra visiškai nepriimtina daugeliui technologinių procesų dėl neproduktyvaus apdorojimo ciklo trukmės padidėjimo.
Šių pavarų perjungiklių eigos skirtumo sumažinimas yra susijęs su jų konstrukcijos sudėtingumu arba padidinimu. Be to, kai kuriais atvejais, norint įjungti mechaninius kontaktinius jungiklius, reikia didelių mechaninių jėgų.
Artumo jungiklių privalumai ir trūkumai
Aukščiau išvardytos aplinkybės lemia būtinybę kurti įrenginius, kurie neturi minėtų trūkumų ir tuo pačiu gali atlikti panašias funkcijas. Tokie įrenginiai yra artumo jungikliai, kurio pranašumai apima:
-
didelis patvarumas su dideliu patikimumu ir dideliu leistinu veikimo dažniu;
-
įjungiant nereikia mechaninių pastangų, mažas jautrumas vibracijai, pagreičiui ir pan.;
-
nereikšmingas parametrų jautrumas santykinai plataus išorinių sąlygų pokyčiams;
-
veiklos paslaugų sąlygų gerinimas.
Dėl žemo artumo jungiklio grįžtamojo ryšio lygio pasiekiamas reikšmingas stabdymo jungiklio konstrukcijos supaprastinimas, išlaikant aukštą tikslumo charakteristikų stabilumą laikui bėgant. Be to, elektrinių ir mechaninių kontaktų nebuvimas užtikrina šių prietaisų priešgaisrinę ir sprogimo saugą, o tai žymiai išplečia galimo jų taikymo sritį.
Vienas iš reikšmingų bekontakčių galinių jungiklių trūkumų yra sudėtingas daugelio konstrukcijos modifikacijų, kurios lengvai įgyvendinamos mechaniniuose kontaktiniuose galiniuose jungikliuose, įgyvendinimas.
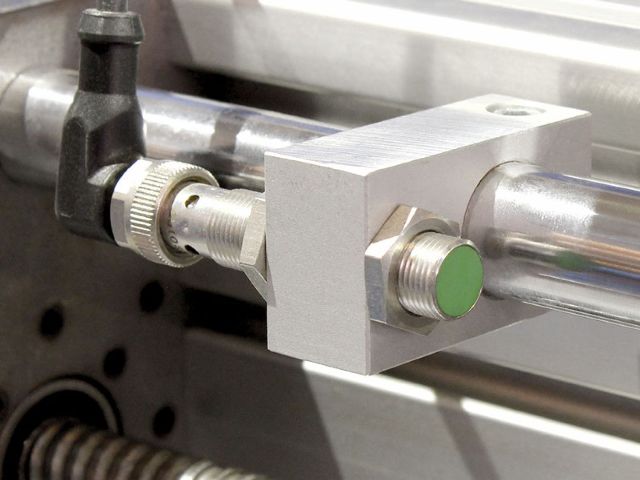
Artumo jungiklio įtaisas
Parametrinio tipo statinių bekontakčių kelio jungiklių veikimo principas pagrįstas magnetinio arba elektrinio lauko iškraipymu, kurį sukuria jautrus elementas, kai jo srityje atsiranda varomasis elementas, dėl kurio atsiranda nesubalansuota būsena. įvyksta jungiklio elektros grandinėje ir suveikia išvesties įtaisas.
Statiniai artumo jungikliai dažniausiai gaminami su viena išėjimo grandine, o kai kuriuose jungikliuose įjungimą lydi signalo atsiradimas išėjime (tiesioginio perjungimo efektas), kituose - išnykimas (atvirkštinio perjungimo efektas), kuris yra lygiavertis. atitinkamai prie mechaninių kontaktų takų uždarymo ir atidarymo kontaktų.
Jei relės režimo artumo jungiklio grandinėje yra stiprinamasis elementas, jutiklio elemento išvesties parametras gali būti nuolatinės funkcinės priklausomybės nuo kontroliuojamo judesio.
Šiuo metu naudojama daugybė bekontakčių važiavimo jungiklių konstrukcijos modifikacijų, kurios skiriasi jautrumo lygiu (darbinio tarpo dydžiu), lizdo vieta arba jautraus elemento plokštuma, palyginti su montavimo plokštuma, kryptimi. vedantys laidai, jutimo elemento pakopų skaičius (projektuojant su plyšiais), plyšio gylis, jungiamųjų laidų ilgis, maitinimo įtampos lygis, apsaugos nuo aplinkos poveikio pobūdis ir kt.
Bekontakčių judesių jungiklių panaudojimo galimybes lemia jų elektrinių ir mechaninių charakteristikų parametrai.
Elektriniai parametrai apima:
- išėjimo signalo pobūdis ir išėjimo grandinių skaičius;
- suvartojimas ir išėjimo galia;
- išėjimo signalo forma; varžos ir įtampos perjungimo koeficientas (transformatorinio tipo jungikliams);
- laiko charakteristikos (sujungimo ir atleidimo laikas) ir degimo dažnis (raiška);
- maitinimo įtampos lygius ir formą, taip pat leistinas jų nuokrypių ribas.
Mechaniniai veikimo parametrai apima:
- jautrumas (darbinio tarpo dydis),
- matmenys ir jungties matmenys;
- tikslumo charakteristikos (didelės ir papildomos klaidos) ir eigos skirtumas;
- montavimo charakteristikos (perjungimo stabdžių tipai ir jų įrengimo būdas, grįžtamojo ryšio lygis, kaip sumontuoti ir sumontuoti jungiklį);
- apsaugos nuo triukšmo lygį.
Daugiau informacijos apie artumo jungiklio įrenginį ir jungiklius rasite čia: Nekontaktiniai mechanizmų padėties jutikliai
Ivenskis Yu. N.Bekontakčiai kelionių jungikliai pramoninėje automatikoje